
 by
by V přilehlém okolí a uvnitř jeskyně Býčí skála proběhnul ve dnech 20. -24. července 2020 kemp vývojářských týmů z Českého vysokého učení technického (ČVUT). Členové katedry kybernetiky a katedry počítačů zdokonalovali své kolové, pásové a kráčející roboty a létající drony při jejich pohybu neznámými podzemními prostorami. Celá akce byla aktivitou v rámci výzkumného úkolu DARPA Sub-T zastřešenou Centrem robotiky a autonomních systémů (CRAS) Českého vysokého učení technického v Praze.

DARPA je agentura amerického ministerstva obrany pro pokročilý obranný výzkum (Defense Advanced Research Projects Agency) s ročním rozpočtem více jak 3 miliardy USD.
Projekt DARPA Subterranean Challenge (SubT CHallenge) je zaměřený na průlomové technologie v oblasti národní bezpečnosti, jehož hlavní doménou jsou podzemní prostory městského podzemí, tunelů a jeskyní. Mezi hlavní cíle projektu patří návrh autonomních systémů pro průstup neznámým prostředím, tvorbu mapových výstupů a detekci přítomnosti osob nebo předmětů v prozkoumávaném podzemí. Týmy MRS, VRAS a AiCenter získaly pod hlavičkou CTU-CRAS-NORLAB v únoru 2020 první místo mezi samostatně financovanými týmy a třetí místo v celkovém pořadí. Češi obstáli v konkurenci týmů světoznámých univerzit, jako MIT nebo CalTech a pro svoji další práci získali cenu 500 000 USD.

Smyslem kempu uskutečněného v prostředí Býčí skály byl další rozvoj schopností robotů se zaměřením na jeskynní prostředí. Cílem bylo testování nově instalovaných sensorů, získávání a vyhodnocování dat a další učení robotů ve specifických podmínkách. Část účastníků bydlela v penzionu ve Křtinách, ovšem mnozí využili pohostinnosti býčiskalské základny a nejotrlejší dokonce přespali pod širákem.
Ladění software a učení systémů probíhalo na louce před Býčí skálou, ostré testování se odehrávalo v hlavní chodbě jeskyně Býčí skála. Testovací polygon vedl až za Šenkův sifon do Velké síně. Jedním z úkolů bylo rozeznávání artefaktů při pohybu podzemím, jako například ležící nehybná osoba, batoh, přilba, mobilní telefon nebo horolezecké lano.

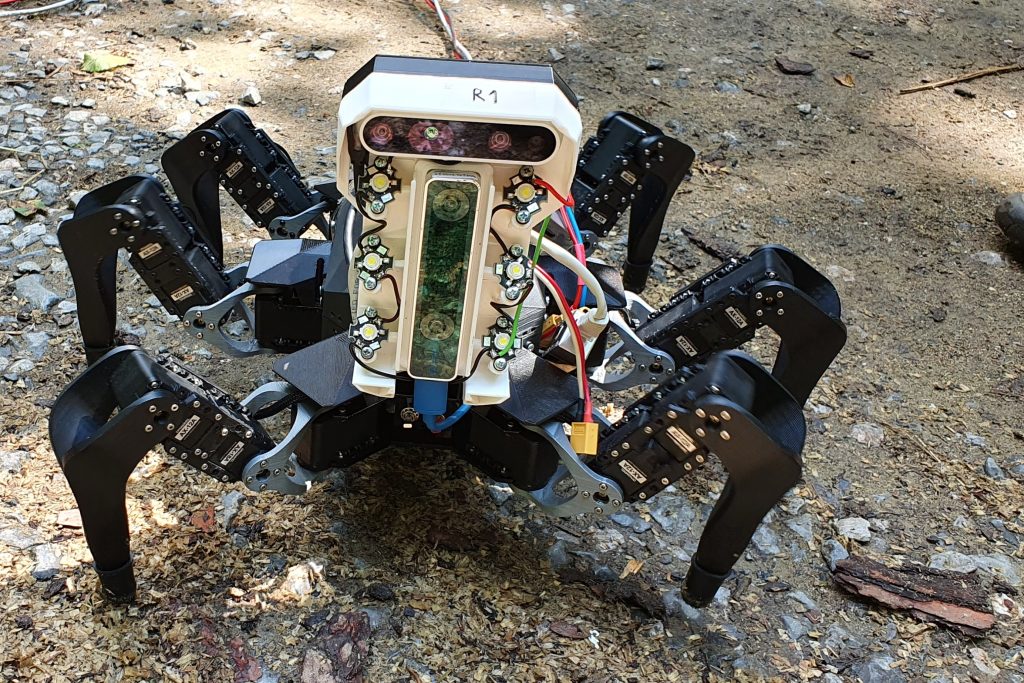
kráčející hexapod 
pásové vozidlo s pomocnými ploutvemi 
kolové vozidlo Husky s LIDAR skenerem na věži
Na stole pod přístřeškem u jeskyňářské základny ve tvaru hříbku byla vysoká koncentrace notebooků, kávy a sladkostí. Vývojáři ladili hexapod, což je šestinohá kráčející robota, s tělem kompletně vytištěným na 3D tiskárně. Hexapod je osázený celou řadou sensorů pro stereoskopické vidění, měření vzdálenosti, mapování podzemí a snímání terénu pro další průstup jeskyní. Na displejích notebooků svítily v Linuxu konzole Robot operating system a kolem jednoho systému naplno fungovali až 4 programátoři současně. Mapování a vše co je výpočetně náročné běželo na NVIDIA Jetson Nano případně Jetson TX, u dronů na Jetson XAVIER. Neuronová síť YOLO prováděla klasifikaci objektů z dat získaných ze sensorů umístěných na dronech a UGV. Po odladění se hexapod vydal na výlet do jeskyně po vlastních nohou, drony odlétly a kolová a pásová vozidla se sunula s charakterickým vrčením.
Z pohledu jeskyňáře se některá zařízení jevila až příliš zranitelná, vzhledem k agresivitě prostředí v podzemí. Hexapodu se bořily špičaté konce kráčejících končetin a tak se vrátil na světlo umazaný po kolena, jako pravý jeskyňář. Vše je ale otázka škálování, jak prohlásili jeho operátoři.

Kolovému vozidlu Husky (bezpilotní pozemní vozidlo UGV na operačním systému Robot Operating System (ROS)) zadělaly na problém schody u Šenkova sifonu s vysokým stoupáním a drolivým písčitým sedimentem. Vozidlo bylo masivně nasvícené obvodovými LED pásy, i přesto v rozlehlých prostorách tmavých vápencových chodeb nedohlédnul Husky dostatečně daleko. Mimo jiné je však vybaven také radarem. Pro mapování v prostoru pomcí lidaru umístěného na věžičce vozidla se používaly technologie 3D SLAM nebo LOAM (LIDAR odometry and Mapping).

Drony běží na platformě Pixhawk s PX4 nebo ArduPilot autopilotem. Jedna autonomní drona nezvládla při průzkumu vertikální průlet komínem a roztříštila se o stěny. To všechno ale k vývoji patří a zejména u autonomních systémů se s podobnými problémy musí počítat. O vtipné vystoupení se postaralo pásové UAV, které se ve svahu hlasitě „rozčilovalo“ hlasem Stephena Hawkinga :“calibrating system… reseting systems… calibrating…“ Nakonec si ale vozidlo poradilo aktivními pásovými ploutvemi, které mu umožňují pádlovat v terénu obdobně jako želvě obrovské.
Byl příjemný zážitek zblízka sledovat tým, který obstojí v celosvětové konkurenci a podiskutovat s opravdovými nadšenci o použitých sensorech a technologiích. Přestože vývojáři brali naše doporučení ohledně specifického prostředí v jeskyních s rezervou, snažili jsme se jim co nejvíce pomoci nastínit záludnosti, na které mohou v reálných jeskyních narazit.
Je fajn, že Češi jsou v této oblasti na špičce a snad se příští rok u Býčí skály budou moci pochlubit dalším skalpem z DARPA Subterranean challenge. Go nerds, go go go!
